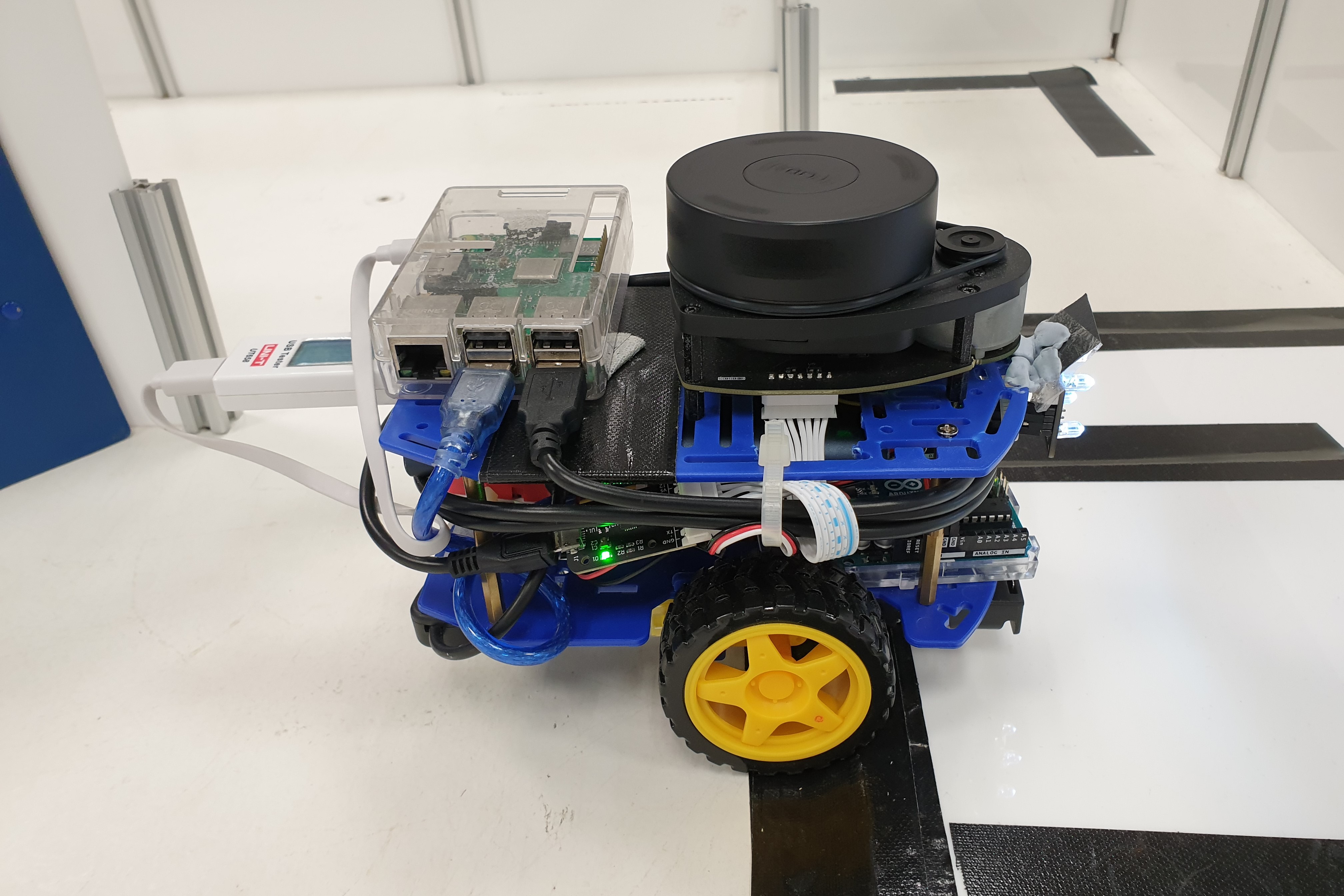
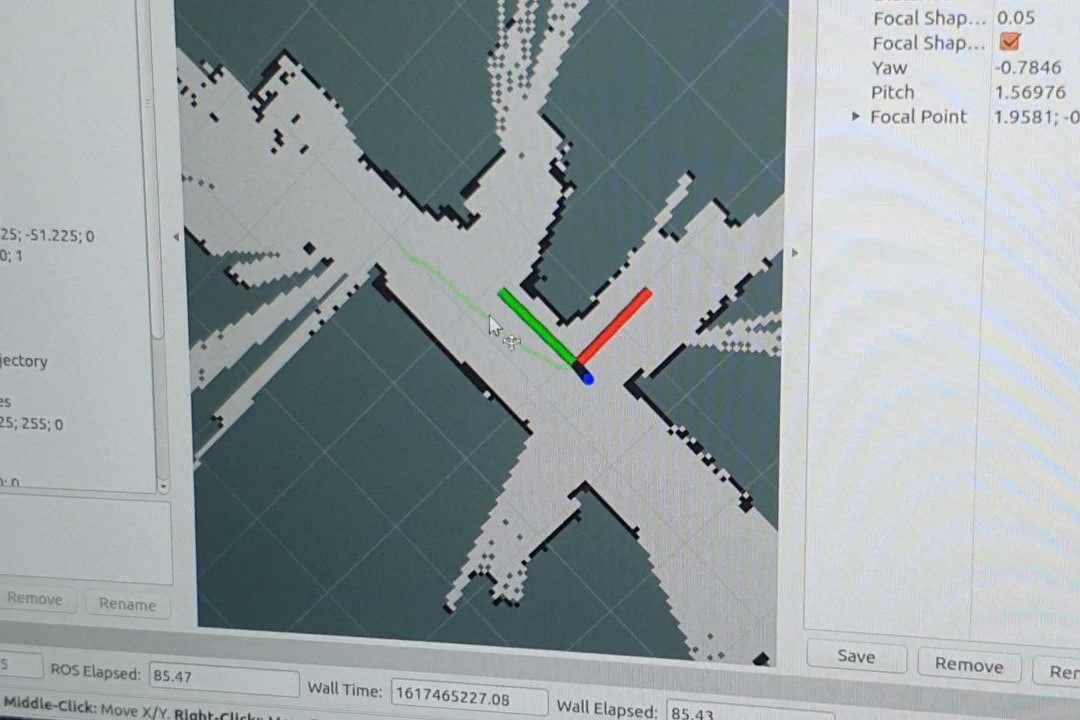
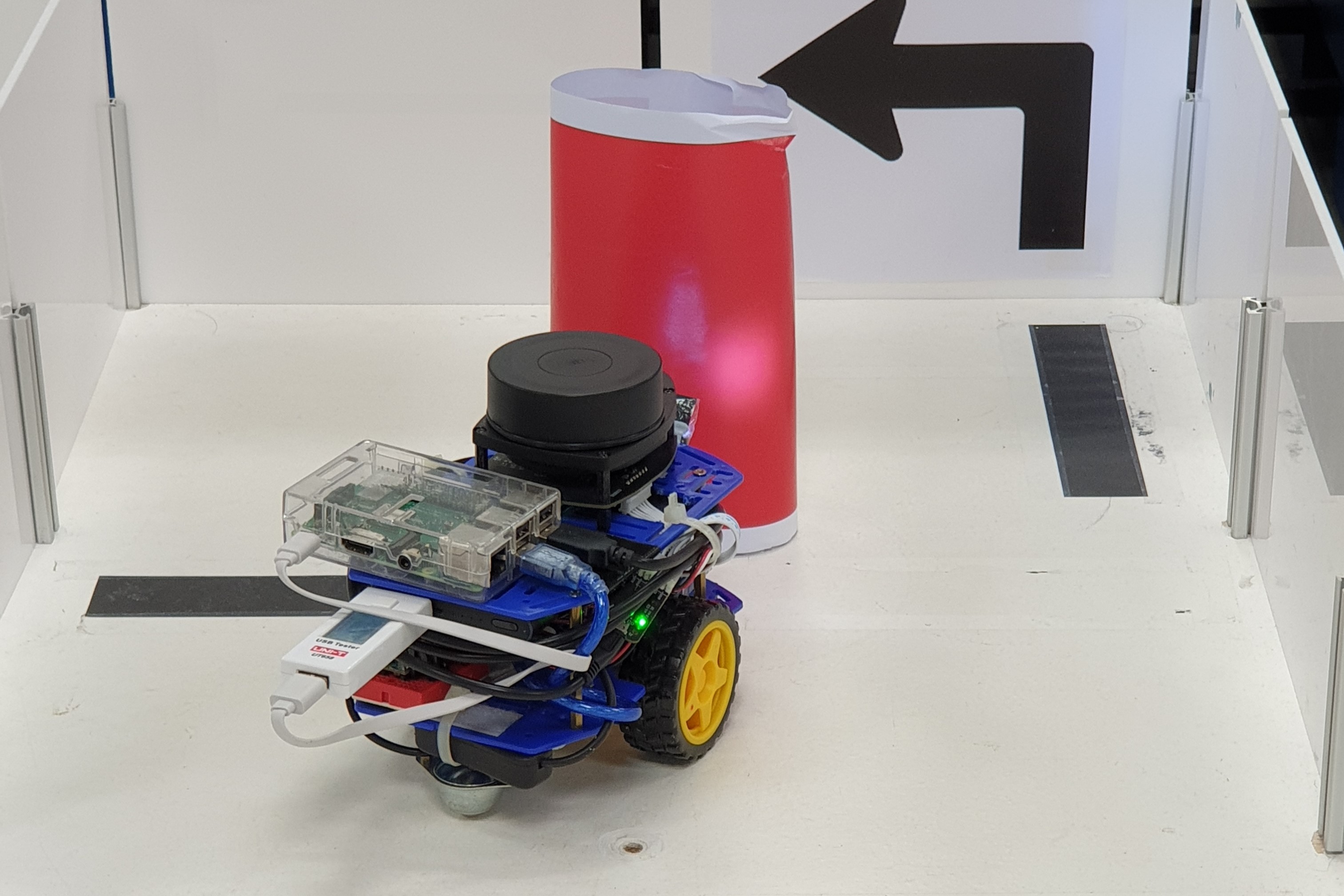
A Search and Rescue Robot capable of being remotely controlled to map its environment using LiDAR. It also has Object and Colour Detection capabilities.
- Module CG1112 Engineering Principles and Practice II
- Report CG1112 Search and Rescue Robot Report
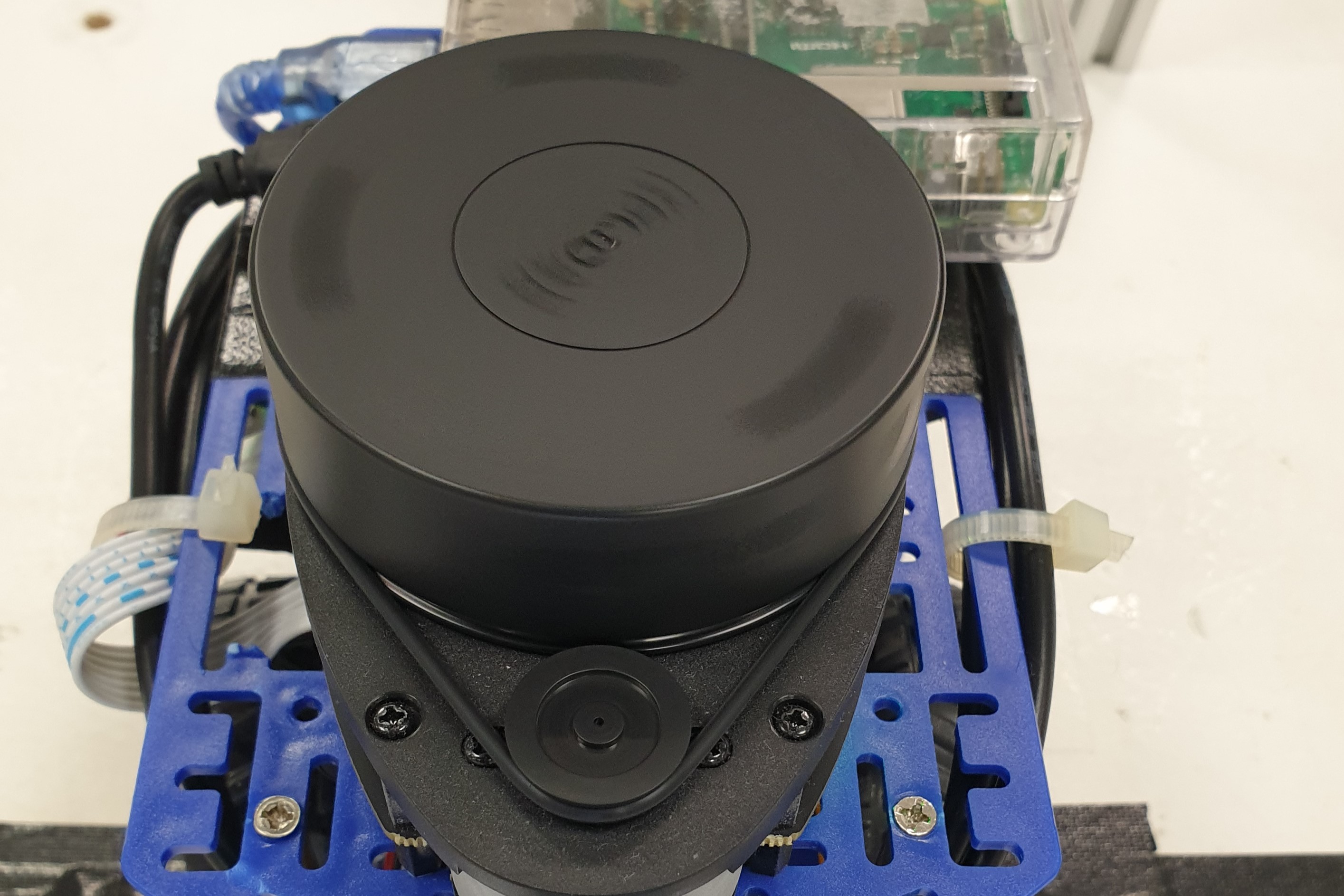
- H/W SLAMTEC RPLidar A1, Raspberry Pi 3, Arduino Uno
- LanguageC
- Github CG1112 Engineering Principles and Practice II